近日,bwin必赢邱禧荷副教授指导2022届硕士研究生王浩宇(第一作者)在国际顶级国际会议IEEE世界机器人与自动化大会(IEEE InternationalConference on Robotics and Automation,简称IEEE ICRA)发表研究成果,题目为“Subequivariant Reinforcement Learning Framework for CoordinatedMotion Control”。IEEE ICRA是机器人领域规模和影响力均排名第一的顶级国际会议,是机器人领域权威研究人员介绍其研究成果的首要国际论坛,是机器人领域最顶级的国际会议之一。该论文第一单位为上海工程技术大学,合作单位为无限光年(上海)技术有限公司。
该研究成果开创性研究框架突破机器人关节协调控制瓶颈。在机器人技术的发展过程中,实现精准高效的协调关节运动控制一直是一个世界性挑战。多关节机器人系统涉及众多自由度,关节之间存在着错综复杂的相互作用和耦合关系,给运动控制带来了巨大困难。传统的强化学习算法和图神经网络方法往往难以准确捕捉这些内在依赖,导致协调性能不佳。为了突破这一瓶颈,团队经过大量深入研究,提出了一种新颖的"CoordiGraph"框架。通过贯彻物理规律,将等变性和次等变性(Subequivariant)原理融入强化学习的关节运动控制流程,从根本上增强了对关节间耦合特征的建模能力。该项创新性研究工作有力突破了传统方法的瓶颈,为解决机器人协调运动控制难题贡献了全新的思路。
2023年,邱禧荷副教授及其指导的2021届硕士研究生史少杰在国际顶级会议、中国计算机学会推荐A类会议国际计算机视觉大会(International Conference on Computer Vision,简称ICCV)上,首次以我校作为第一作者和第一完成单位发表了论文。该会议吸引一万余篇投稿,接收率仅为20%。这篇论文的发表不仅是电子电气工程学院的一次重要突破,也是我校在人工智能领域顶级国际会议上发表研究成果的突破。
本次研究成果是我校首次在机器人、控制顶级会议首次以第一作者第一单位发表文章。ICRA作为机器人领域的顶级会议,本次成果获录用充分展示了我校在人工智能和计算机视觉领域、控制领域的研究实力,为我校在全球科研舞台上的影响力进一步加分。
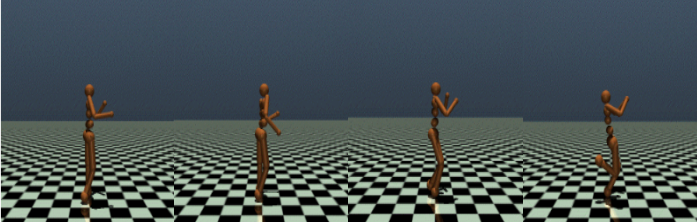
图.在MuJoCo环境中训练一个类人智能体(预印版见http://arxiv.org/abs/2403.15100)
